Hunor;

 HR
HR  DE
DE  EN
EN 
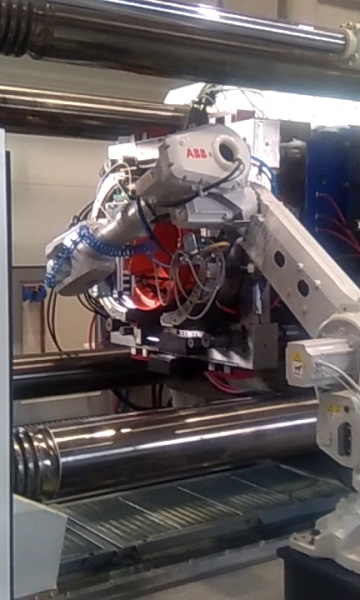
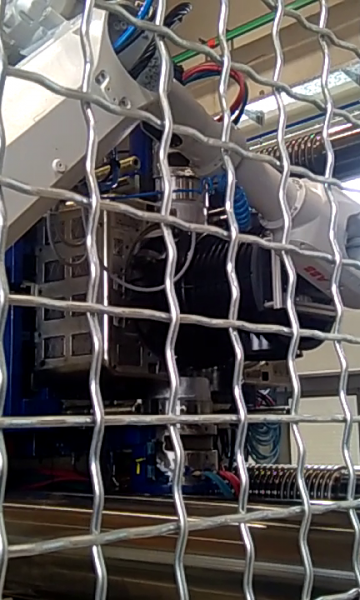
Posluživanje injekcijske preše
ZAHTJEVI PROJEKTA
- minimalni prostor za ugradnju robota
- jednostavna izmjena robotskih gripera
- osigurati minimalni takt vađenja komada
- transportna traka za iznošenje komada iz ćelije
- jednostavna promjena proizvoda
RJEŠENJE
- 6-osni ABB industrijski robot
- namjensko postolje za robota
- sustav brze promjene gripera
- sustav brze spojnice pneumatskog sustava
- offline planiranje trajektorija vađenja komada
- izrada rutina za jednostavno prekidanje ciklusa i automatskog izlaska robota iz bilo koje pozicije u slučaju prekida
- SIEMENS PLC sustav za nadzor robotske ćelije
- parametarska izrada robotskog programa za jednostavnu promjenu proizvoda
- mogučnost jednostavnog dodavanja novih proizvoda


KONTAKTIRAJTE NAS:
Obratite nam se s povjerenjem sa Vašim pitanjima.

HUNOR d.o.o.
Remetinec 42, 10 020 Zagreb
www.hunor.hr
OIB: 70897833190
Radno vrijeme:
Pon - Pet; 7:00 - 15:00

Copyright © 2024 HUNOR. Sva prava pridržana